Podstawy taktowania zegarowego
Oryginalny tekst artykułu w języku angielskim znajduje się tutaj
Część 1 - podstawy taktowania zegarowego
Taktowanie jest integralnym aspektem konwersji cyfrowego dźwięku, a prawie wszystkie produkty audio mają wewnątrz jakiś zegar. Jak omówiono w naszej poprzedniej serii poświęconej konwersji cyfrowo-analogowej, cyfrowe nagrania audio składają się z serii próbek. Produkt audio, taki jak przetwornik cyfrowo-analogowy, musi wiedzieć, kiedy coś zrobić z próbkami, które otrzymuje na wejściu, bez względu na to, jakie może być to zadanie – i tu pojawia się temat zegarów.
W kontekście elektroniki cyfrowej termin taktowanie odnosi się do sygnału, który utrzymuje wszystkie obwody w systemie zsynchronizowane i działające w tym samym czasie. Aby generować precyzyjny i niezawodny sygnał, system zegarowy musi mieć źródło: coś, co określa, jak długi jest okres czasu. To źródło zwykle ma postać oscylatora – obwodu elektrycznego, który zapewnia regularne wzrosty i spadki napięcia.
W dCS używamy oscylatorów kwarcowych jako podstawy naszych systemów zegarowych. Kwarc jest materiałem piezoelektrycznym, co oznacza, że po przyłożeniu do niego napięcia fizycznie odkształca się i wygina w obie strony. Kryształ można zaprojektować tak, aby rezonował mechanicznie z określoną częstotliwością (na przykład co 44100 sekundy), a przy prawidłowo zaprojektowanym obwodzie elektrycznym rezonans ten można przekształcić w napięcie oscylacyjne.
Częstotliwość rezonansu kryształu pozwala systemowi wiedzieć, jak długi jest określony przyrost czasu (np. 1/44100 sekundy). Mierząc te przyrosty czasu, system może dokładnie rozdzielić próbki audio. Pozwala to uniknąć niepożądanego przesunięcia próbek w czasie, które w przypadku wystąpienia podczas procesu konwersji cyfrowo-analogowej mogłoby spowodować zniekształcenie sygnału audio słyszanego podczas odtwarzania.
Projektowanie zegarów w cyfrowym audio (zarówno wewnętrzne systemy zegarowe, jak i zewnętrzne zegary wzorcowe) to temat wart poważnego rozważenia przy zakupie dowolnego systemu audio high-end. Prawdopodobnie taktowanie może mieć taki sam wpływ na jakość dźwięku, jak obwody DAC, i ważne jest, aby wziąć pod uwagę projekt i implementację systemu taktowania jako całości, zamiast wybierać po prostu komponenty, które mają imponującą specyfikację na papierze.
Ponieważ zegar określa czas operacji przetwornika cyfrowo-analogowego, jest on odpowiedzialny za zapewnienie konwersji próbek we właściwym czasie, co ma kluczowe znaczenie dla zapewnienia, że dźwięk, który słyszymy podczas odtwarzania, brzmi tak, jak powinien.
Jitter
Jeśli system zegarowy nie generuje prawidłowo sygnału podczas procesu konwersji C/A lub sygnał nie jest w stanie prawidłowo dotrzeć do przetwornika cyfrowo-analogowego, doświadczamy czegoś, co nazywa się jitterem, co jest wysoce niepożądane w audio.
Jitter jest opisywany jako każda nieprawidłowość w taktowaniu zegara używanego przez przetwornik cyfrowo-analogowy i jest wytwarzany na różne sposoby. Może to być wynikiem złej konstrukcji analogowej, zakłóceń elektromagnetycznych, słabej jakości cyfrowego kabla audio lub wielu innych przyczyn, które omówimy w kolejnych etapach.
Rzeczywisty słyszalny efekt jittera zależy od jego natury, ale może mieć zauważalny wpływ na dźwięk. Jeśli jitter jest okresowy, wstęgi boczne pojawią się po obu stronach częstotliwości sygnału. Brzmi to jak ostre zniekształcenie, ponieważ do dźwięku dodawane są nieistniejące w sygnale źródłowym. Jeśli jitter ma charakter głośny, powoduje to „rozmazanie” energii sygnału. To z kolei zwiększa poziom szumów systemu, co powoduje maskowanie drobnych szczegółów w muzyce.
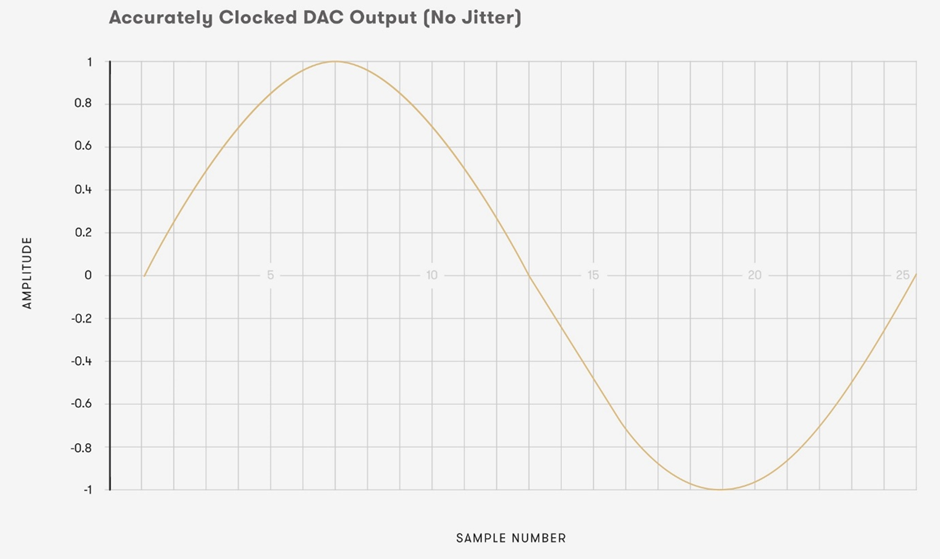
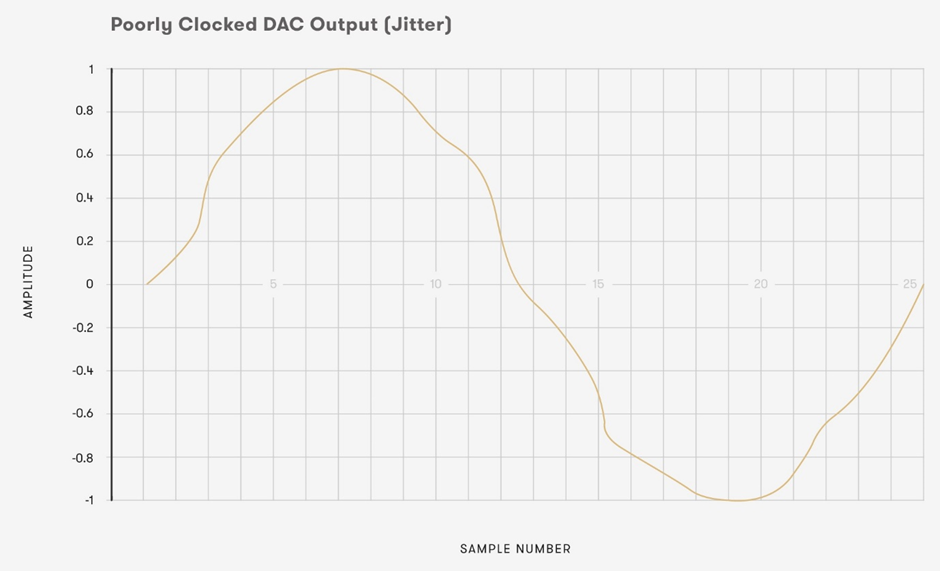
Powyższe wykresy pokazują przykład tego, co może się stać przy kiepskim taktowaniu. W obu przykładach fala sinusoidalna została zrekonstruowana przez przetwornik cyfrowo-analogowy przy użyciu 25 próbek. Każda z tych próbek ma dokładnie taką samą amplitudę na obu wykresach; jedynym czynnikiem, który uległ zmianie, jest czas konwersji kilku próbek. Rezultatem jest widoczna degradacja sygnału. Gdyby ten sygnał był odtwarzany przez przetwornik, sygnał na dolnym wykresie brzmiałby zauważalnie gorzej niż górny ze względu na jitter.
Chociaż powyższy przykład jest raczej przesadzony, pokazuje, że właściwa próbka w niewłaściwym czasie jest niewłaściwą próbką. To pokazuje, jak ważne jest dokładne taktowanie w cyfrowym systemie odtwarzania dźwięku.
Ludzkie ucho i mózg są niezwykle wrażliwe na nieprawidłowości w taktowaniu dźwięku. Jeśli przetwornik cyfrowo-analogowy doświadcza jittera i nie konwertuje sygnałów na napięcia analogowe we właściwym czasie, poczucie przestrzeni podczas występu może być mocno wypaczone, a nawet utracone. Z tego powodu inżynierowie dCS bardzo dbają o zminimalizowanie jittera we wszystkich aspektach projektu Ring DAC.
Jeśli jitter zostanie zakodowany w sygnale na etapie nagrywania, pozostanie on w sygnale na zawsze. Istnieją kroki, które można podjąć, aby zapobiec dalszej degradacji sygnału (takie jak ponowne taktowanie lub nawet buforowanie sygnału w pamięci RAM), ale nie jest możliwe skorygowanie lub usunięcie jittera, który pojawia się podczas procesu nagrywania.
Na etapie odtwarzania, w miarę możliwości, należy zminimalizować jitter, aby uniknąć pogorszenia lub zmiany sygnału, który słyszymy. Pod warunkiem, że nagranie ma przyzwoitą jakość, posiadanie przetwornika cyfrowo-analogowego odtwarzającego próbki audio w odpowiednim momencie pomoże zapewnić słuchaczom dokładne odwzorowanie oryginalnego zdarzenia dźwiękowego. Sygnał przychodzący do przetwornika cyfrowo-analogowego z zewnętrznego źródła, takiego jak transport CD, może w rzeczywistości mieć bardzo nieregularnie rozmieszczone próbki po przybyciu (do punktu, który omówimy w kolejnych punktach), ale pod warunkiem, że sam przetwornik konwertuje te próbki w regularnych odstępach czasu, jakość dźwięku pozostanie nienaruszona.
Następne dwa tematy będą dotyczyć głównych rodzajów jittera: wewnętrznego i interfejsu.
Część 2 - Jitter wewnętrzny
Istnieją dwa główne rodzaje jittera: wewnętrzne i interfejsowe. Wewnętrzny jitter odnosi się do jittera, który jest wytwarzany wewnątrz produktu, takiego jak przetwornik cyfrowo-analogowy, poprzez efekty takie jak szum fazowy na oscylatorze. Jitter interfejsu odnosi się do fluktuacji wychwytywanych przez interfejsy używane do przesyłania sygnałów audio i zegara. Może to nastąpić jako zakłócenia wychwytywane przez sam kabel lub przez kabel zasadniczo działający jako filtr dla pewnych częstotliwości, wpływając na integralność fali prostokątnej (wyjście obwodu zegara) przechodzącej przez niego.
Istnieje kilka odmian oscylatorów kwarcowych, ale oscylatory kwarcowe sterowane napięciem (VCXO) i oscylatory kwarcowe sterowane w piecu (OCXO) to dwa z najpopularniejszych w audio.
Oscylatory sterowane napięciem lub VCO są również używane w produktach audio, ale działają one na zasadzie czysto elektronicznej i nie wykorzystują materiałów elektromechanicznych, takich jak kwarc, do generowania sygnałów.
Oscylatory kwarcowe mają zwykle lepszą stabilność w zakresie poziomu szumów fazowych niż VCO, co oznacza, że sam oscylator może być mniej podatny na jitter. Oznacza to, że z punktu widzenia ogólnego projektu zegara, w przetworniku cyfrowo-analogowym z oscylatorem kwarcowym, pętla synchronizacji fazy lub PLL (obwód, który dopasowuje częstotliwość zegara przetwornika cyfrowo-analogowego do zegara przychodzącego sygnału audio) może być przesunięty w kierunku odrzucanie jittera interfejsu za pomocą węższego pasma PLL.
Jest to możliwe, ponieważ sam oscylator kwarcowy jest mniej podatny na zakłócenia fazowe, a następnie na drgania. W związku z tym, jeśli zdarzy się, że na interfejsie pojawi się jitter, na przykład niestabilny sygnał AES, ten jitter nie zostanie przekazany do przetwornika cyfrowo-analogowego, ponieważ pojawi się i zniknie, zanim zareaguje na niego PLL. Zamiast tego DAC opiera się bardziej na oscylatorze w celu zapewnienia dokładności taktowania między poszczególnymi próbkami, co w przypadku produktu dCS i zegara opartego na krysztale kwarcowym jest bardzo wysokim poziomem dokładności.
Alternatywą do tego byłoby użycie VCO jako oscylatora. Jednak biorąc pod uwagę potencjalnie gorsze poziomy szumów fazowych VCO w porównaniu z oscylatorem kwarcowym, PLL w produkcie może wymagać odrzucenia wewnętrznego jittera, ponieważ sam oscylator byłby prawdopodobnie bardziej podatny na szum fazowy, co można osiągnąć poprzez użycie szerszego pasma PLL. Oznacza to, że wszelkie zakłócenia lub efekty filtrowania kabli będą miały bardziej bezpośredni wpływ na dźwięk, co w niektórych przypadkach może być niepożądane.
Jeśli tak jest, możesz się zastanawiać, dlaczego jakikolwiek produkt używałby VCO jako źródła zegara. Jedną z korzyści płynących z używania VCO nad oscylatorem kwarcowym jest możliwość, że zegar ma większy „zakres przyciągania”, co oznacza, że może blokować szerszy zakres sygnałów (na przykład sygnały płynące konsekwentnie zbyt szybko lub zbyt wolno).
Z naszego doświadczenia wynika, że w kontekście wysokiej klasy cyfrowego systemu odtwarzania dźwięku, jakość taktowania przetwornika cyfrowo-analogowego nie powinna być trwale zagrożona, aby umożliwić podłączenie i prawidłowe działanie nieoptymalnego źródła. W dCS decydujemy się na użycie oscylatora kwarcowego o wysokim poziomie dokładności i stabilności, pozwalającym na zakres naciągu +/- 300 części na milion (PPM), zgodnie ze specyfikacją AES.
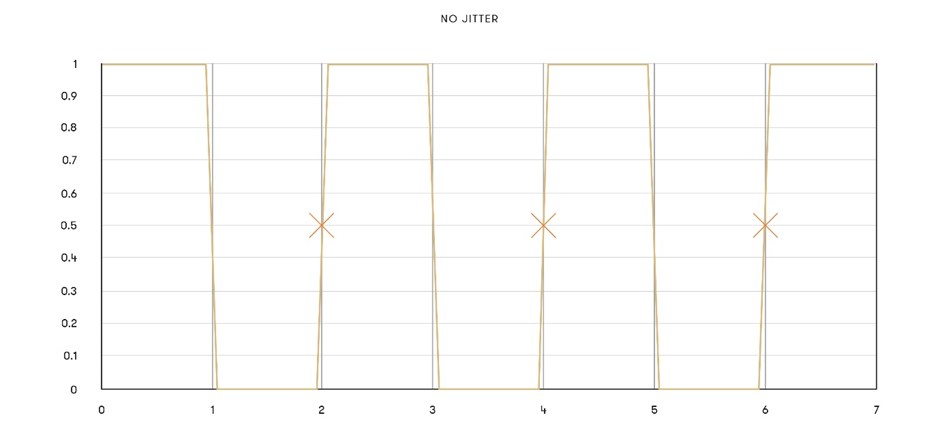

Te wykresy pokazują wyolbrzymiony przykład wpływu jittera na wyjściową falę prostokątną przez obwód zegara. Jak wspomniano wcześniej, jitter wpłynął zarówno na czasy przejścia fali, jak i na szczytowe napięcia, które fala może osiągnąć. Skutkuje to zmianą punktu, w którym system będzie postrzegał, dla dobra argumentów, zmianę z 0 na 1. Systemy zegarowe obserwują „zbocze narastające” sygnału zegarowego, w którym napięcie wzrasta, a więc punkt na zboczu narastającym Na wykresach zaznaczono, gdzie amplituda przekracza 0,5. Na pierwszym wykresie czas tego jest regularny – punkty przejścia na wznoszących się krawędziach przypadają odpowiednio na 2, 4 i 6 na osi X. Kiedy wprowadzany jest jitter, punkty przejścia są przesuwane do przodu lub do tyłu w zależności od charakteru jittera. Nie jest regularne, jest przypadkowe.
Istnieje kilka czynników, które mogą powodować zakłócenia fazowe (i w konsekwencji jitter) na oscylatorze i wszystkie te czynniki należy wziąć pod uwagę przy projektowaniu systemu zegarowego.
Fizyczne wibracje
Ponieważ podstawą zegara kwarcowego jest jego właściwość piezoelektryczna (fizyczne odkształcenie kryształu po przyłożeniu napięcia), wszelkie zewnętrzne wibracje fizyczne mogą powodować niedokładność zegara. Zewnętrzny ruch nie musi być energiczny, aby powodować niedokładność. Może być tak subtelny, jak na przykład wibracje mechanizmu CD wewnątrz produktu. Należy podjąć wszelkie środki, które można podjąć w celu odizolowania obwodów zegara od zewnętrznych wibracji fizycznych, ponieważ zapewnia to wyższy poziom wydajności zegara.
Zasilanie
Zdolność kryształu kwarcu (lub dowolnego materiału piezoelektrycznego) do utrzymywania stałej częstotliwości oscylacji zależy od stabilnego, wolnego od zakłóceń sygnału prądu stałego o odpowiedniej specyfikacji. W przypadku zarówno VCXO, jak i OCXO oznacza to czysty prąd stały dla zasilania. W przypadku VCXO, co ważniejsze, napięcie sterujące musi być stabilne (w tego typu oscylatorach napięcie sterujące służy do precyzyjnej regulacji częstotliwości kryształu). Jeśli istnieje jakakolwiek zmiana w szynach zasilających doprowadzonych prąd czy napięcie do kryształu, zmieni się częstotliwość, z jaką rezonuje. W produktach z zegarem kwarcowym projektanci powinni zawsze dążyć do jak najczystszego zasilania kryształu (kryształów) o odpowiednim napięciu i częstotliwości dla specyfikacji regionu, w którym produkt jest używany.
Przesłuchy
Obwody elektroniczne mogą generować pole elektromagnetyczne. Jest to często widoczne podczas przesyłania sygnałów o wysokiej częstotliwości, takich jak cyfrowe sygnały audio, przez ścieżki miedziane znajdujące się na płytkach drukowanych (płytkach drukowanych). Ścieżki miedziane zasadniczo działają jak anteny, z cyfrowymi sygnałami audio emitowanymi z płyty. Zakłócenia te mogą mieć wpływ na powiązane obwody zegara, jeśli znajdują się one blisko siebie, negatywnie wpływając na działanie zegara.
Właściwym sposobem na wyeliminowanie tego problemu jest zaprojektowanie PCB produktu w taki sposób, aby zminimalizować zjawisko indukcji czy upływu. Wtórnym do tego jest zapewnienie, że wszelkie wrażliwe części są oddzielone od tych, które mogą powodować zakłócenia. Jeszcze skuteczniejszą metodą jest całkowite usunięcie wielu potencjalnych źródeł zakłóceń EM z produktu, tam gdzie to możliwe, na przykład za pomocą zegara głównego (samodzielnego zegara z własnymi dedykowanymi obwodami i zasilaczami).
Częstotliwość zegara
Idealnym sposobem zaprojektowania zegara wewnątrz produktu audio jest posiadanie dwóch oscylatorów: jednego działającego z bezpośrednią wielokrotnością 44,1 kHz, a drugiego działającego z bezpośrednią wielokrotnością 48 kHz. Powodem tego jest to, że prawie wszystkie częstotliwości próbkowania używane w cyfrowym audio są wielokrotnościami tych „częstotliwości podstawowych” (w tym DSD, który działa z bardzo wysokimi wielokrotnościami 44,1 kHz). Jeśli zegar nie używa bezpośrednich wielokrotności częstotliwości próbkowania, która ma być taktowana, matematyka staje się bardziej złożona, a elektronika potrzebna do wygenerowania prawidłowej częstotliwości jest bardziej podatna na jitter.
Próba taktowania sygnału 44,1 kHz z zegarem 10 MHz wymagałaby w jakiś sposób syntezy 44,1 kHz z 10 MHz, co matematycznie nie jest czyste. W związku z tym ten typ zegara będzie musiał używać metod, takich jak asynchroniczna konwersja szybkości, aby poprawnie pomnożyć szybkość. Metody te niezmiennie skutkują „brudniejszym” widmem częstotliwości sygnału zegarowego, co oznacza, że system będzie bardziej podatny na jitter.
Produkty dCS wykorzystują dwa oscylatory, pracujące z 2 do potęgi 9 podstawowych częstotliwości audio (44,1 kHz i 48 kHz), czyli 22,5792 MHz i 24,576 MHz. Łatwy podział na dowolną wymaganą częstotliwość skutkuje czystszym widmem zegara, a w rezultacie mniejszym jitterem.
Temperatura zagara
Chociaż temperatura zegara nie jest źródłem szumu fazowego, może wpływać na stabilność oscylatora. Częstotliwość rezonansowa kryształu kwarcu jest odwrotnie proporcjonalna do jego rozmiaru, a co za tym idzie, jego temperatury. Wraz ze wzrostem temperatury kwarc rozszerza się fizycznie. Wraz ze spadkiem temperatury kurczy się. Powoduje to zmiany w częstotliwości rezonansowej kwarcu, ponieważ rozmiar fizyczny jest teraz inny. W związku z tym należy unikać wahań temperatury w systemach cyfrowych lub łagodzić skutki tam, gdzie jest to możliwe.
Istnieje kilka metod przeciwdziałania zmianom temperatury wewnątrz oscylatora kwarcowego. Jednym z podejść jest użycie standardowego w branży OCXO. OCXO ma na celu usunięcie zmian temperatury kryształu za pomocą elementu grzejnego Curie, aby utrzymać go w stabilnej temperaturze. Urządzenie Curie to grzałka rezystancyjna, której rezystancja gwałtownie wzrasta po osiągnięciu określonej temperatury, skutecznie zmniejszając moc grzewczą. Temperatura przekroczy, a następnie ustabilizuje się wokół wymaganej temperatury. Gdy temperatura produktu nie jest stabilna (np. gdy jest zasilany z zimnego), z powodu opóźnień termicznych wystąpią pewne wahania temperatury, a w konsekwencji częstotliwość, gdy system „poluje” wokół temperatury docelowej . Jednak po ustabilizowaniu się temperatury kryształu zegar wygeneruje stabilną częstotliwość.
Innym podejściem jest użycie wspomaganego mikrokontrolerem VCXO, tak jak robiliśmy to w wielu produktach dCS. W tym podejściu nie wykorzystuje się żadnych elementów grzejnych, aby uwzględnić zmiany temperatury. Zamiast tego wykorzystujemy duże ilości mocy obliczeniowej dostępnej dzięki konstrukcji naszych produktów opartej na układach FPGA, aby stale dostosowywać napięcie sterujące dostarczane do VCXO w celu kompensacji zmian temperatury.
W przypadku dCS Master Clock, takiego jak Rossini Clock czy Vivaldi Clock, regulacje te opierają się na intensywnych pomiarach przeprowadzonych podczas produkcji. Podczas procesu produkcyjnego umieszczamy zegar (i płytkę drukowaną, do której zegar jest przymocowany) w komorze środowiskowej. Ta komora mierzy częstotliwość zegara w stosunku do aktualnie kontrolowanej temperatury otoczenia i zapisuje ją na FPGA wewnątrz produktu. Następnie zmienia się temperaturę, mierzy się zegar i ponownie rejestruje wydajność. Proces ten powtarza się przez 18 godzin. Dzięki temu możemy dokładnie wykreślić, jak zachowuje się VCXO w zegarze głównym w dowolnej temperaturze.
Te dane działają w produkcie poprzez regulację napięcia sterującego, które jest podawane do VCXO. Wyższe lub niższe napięcie wytworzy wyższą lub niższą częstotliwość rezonansową. To, w połączeniu z wiedzą o jego odporności na temperaturę, zapewnia, że częstotliwość wyjściowa zegara jest zawsze stabilna. W dowolnej normalnej temperaturze pracy częstotliwość wyjściowa zegara będzie stała.
Jest to ciągły proces w zegarach Rossiniego i Vivaldiego, w którym temperatura zegara jest regularnie mierzona, a napięcie sterujące jest regulowane, jeśli temperatura zegara się zmienia. W rezultacie nowy zegar Vivaldi, na przykład, może osiągnąć dokładność powyżej +/- 1 PPM po uruchomieniu. Gdy zegar ustabilizuje się w swoim otoczeniu, dokładność zwykle wzrasta do +/- 0,1 PPM.
W następnym temacie przyjrzymy się drugiemu głównemu rodzajowi jittera: jitterowi interfejsu.
Część 3 – Jitter pochodzący z interfejsu
Jeśli produkt blokuje sygnał zegara zewnętrznego źródła, takiego jak transport CD podłączony do przetwornika cyfrowo-analogowego, zakłócenia odbierane przez cyfrowe kable audio między produktami mogą zamazać czasy przejścia danych zegara w sygnale – zasadniczo zmieniając moment, w którym 0 zmienia się na 1 lub odwrotnie.
Zbalansowane przewody pomagają zredukować zakłócenia indukowane w kablach. Dlatego format AES/EBU wykorzystuje ekranowaną skrętkę o impedancji 110 Ω. To skutecznie chroni przewodniki w kablu przed większością zakłóceń elektromagnetycznych (EMI) i filtruje wszystko, co odbiera, do ziemi, eliminując je z sygnału. Każde EMI, które dociera do przewodników, zostaje anulowane w fazie, ponieważ każdy przewodnik jest dokładnie przesunięty w fazie o 180 stopni. (Ponieważ pary są prowadzone razem, wszelkie zakłócenia będą indukowane w obu przewodach w fazie ze sobą, a tym samym zniesione.)
Ważne jest, aby upewnić się, że kabel ma wysoką przepustowość wymaganą dla sygnałów cyfrowych. Fale prostokątne przenoszące sygnał mają bardzo szybki czas narastania między stanami niskim i wysokim (zerami i jedynkami). Szybki czas narastania przekłada się na bardzo wysoką częstotliwość – w zakresie megaherców. Z tego powodu zaleca się użycie dobrej jakości kabla 110Ω do transmisji AES i kabla 75Ω do transmisji S/PDIF, który jest specjalnie zaprojektowany do przenoszenia cyfrowych danych audio.
Kiedy sygnał cyfrowy jest przepuszczany przez kabel, kabel będzie do pewnego stopnia działał jak filtr. Źle zaprojektowany kabel, który nie nadaje się do użytku z interfejsem, do którego jest przeznaczony (takim jak na przykład AES3), może potencjalnie odfiltrować wysokie częstotliwości z sygnału, zanim dotrze on do przetwornika cyfrowo-analogowego z urządzenia źródłowego.
Powoduje to interakcję pomiędzy dowolnymi dwoma kolejnymi bitami danych w sygnale, zwaną interferencją międzysymbolową. W zależności od relacji między pierwszym a drugim z dowolnych dwóch bitów, przejście między nimi może być czasowo rozmazane. Idealnie czysta pionowa linia fali prostokątnej staje się bardziej nachylona, co oznacza, że dokładny moment zmiany 0 na 1 lub odwrotnie może być rozmyty. Krótko mówiąc, jitter można wprowadzić wyłącznie z interakcji w samych danych.
Jeśli dane taktowania w sygnale audio są używane do synchronizowania zegara przetwornika cyfrowo-analogowego z zegarem źródła, ta interferencja międzysymbolowa będzie miała negatywny wpływ na jakość dźwięku, ponieważ może wprowadzić jitter na zegar przetwornika cyfrowo-analogowego. Jednakże, jeśli system audio korzysta z zegara wzorcowego a informacja o taktowaniu osadzona na przykład w sygnale AES3 nie jest już używana, skutki interferencji międzysymbolowej są zanegowane. Chociaż występuje ten sam efekt filtrowania w kablu i interakcje w danych, zakłócenia międzysymbolowe nie powodują drgań. Dzieje się tak, ponieważ sygnał Word Clock wysyłany z Master Clock jest regularny i nie zmienia się tak jak sygnał AES.
Warto zauważyć, że ponieważ pętla synchronizacji fazowej PLL stosowana w produkcie dCS działa wolno, a zastosowane obwody odzyskiwania zegara są bardzo wydajne, skutki interferencji międzysymbolowej są zminimalizowane w przypadkach, gdy przetwornik cyfrowo-analogowy musi zablokować informacje zegara zawarte w dźwięku sygnał (na przykład sytuacje, w których zegar wzorcowy nie jest dostępny).
W następnym punkcie omówimy synchronizację zegara, na przykład sposób wykorzystania pętli synchronizacji fazy do synchronizacji dwóch różnych domen zegara, takich jak DAC i podłączony transport.
Część 4 – Synchronizacja Zegarów
Problem pojawia się, gdy wiele cyfrowych urządzeń audio, każde z własnym wewnętrznym zegarem, musi ze sobą współpracować. Weźmy na przykład wprowadzenie sygnału z transportu CD do przetwornika cyfrowo-analogowego. DAC ma bufor – sekcję pamięci tymczasowej, w której przechowywane są próbki audio, które otrzymuje z transportu CD. Zegar transportu decyduje, kiedy próbka jest wysyłana do przetwornika cyfrowo-analogowego, a zegar przetwornika cyfrowo-analogowego określa, kiedy próbka jest używana i konwertowana na napięcie analogowe.
W idealnym świecie zegary w przetworniku cyfrowo-analogowym i transporcie działałyby dokładnie w tym samym tempie, bez zmian czasu. W rzeczywistości jednak zegary będą różniły się średnio (potencjalnie spowodowane przez wewnętrzne czynniki jittera omówione wcześniej). Stanowi to problem nieco inny niż jitter.
Jeśli zegary pracują średnio w różnym tempie przez długi czas i są pozostawione samym sobie bez możliwości ich synchronizacji, nadejdzie moment, w którym albo bufor w przetworniku cyfrowo-analogowym zużyje całą dostępne próbki z transportu, ponieważ transport wysyła próbki zbyt wolno / DAC używa ich zbyt szybko, lub przepełnienie bufora, ponieważ transport wysyła próbki zbyt szybko / DAC używa ich zbyt wolno. Spowoduje to chwilowe wyłączenie dźwięku, ponieważ przetwornik cyfrowo-analogowy musi wszystko porzucić i ponownie zablokować sygnał audio, aby próbki audio ponownie przepływały prawidłowo.
Istnieją dwa główne sposoby rozwiązania tego problemu. Po pierwsze, w cyfrowym sygnale audio osadzone są fragmenty informacji o taktowaniu, które transport przekazuje w formacie S/PDIF lub AES. Przetwornik cyfrowo-analogowy może przeglądać te informacje o taktowaniu i dostosowywać prędkość własnego zegara. Oznacza to, że zegary urządzenia źródłowego i przetwornika cyfrowo-analogowego będą teraz działały z tą samą szybkością, więc zaniki nie będą już występować.
Drugą metodą, którą można zastosować, jest synchronizowanie wewnętrznych zegarów głównych źródła sygnału i przetwornika cyfrowo-analogowego do sygnału z zegara zewnętrznego. Zegar główny to jednostka, która znajduje się na zewnątrz wszystkich innych jednostek w systemie i dostarcza sygnał zegarowy, zwany Word Clock, do reszty systemu. Zegary wewnętrzne wszystkich innych jednostek w systemie mogą być wtedy synchronizowane do zegara zewnętrznego, co oznacza, że przeciętnie działają z taką samą szybkością jak zegar główny. Oznacza to, że w żadnym momencie DAC nie powinien cierpieć z powodu przerw lub ponownego zablokowania z powodu zbyt niskiego lub przepełnienia bufora, ponieważ przeciętnie próbki są wysyłane z urządzenia źródłowego z taką samą szybkością, z jaką są zużywane przez DAC.
Wspólnym czynnikiem między tymi dwiema metodami jest to, że obie wymagają metody synchronizacji przychodzącego sygnału z wewnętrznym zegarem produktu za pomocą pętli synchronizacji fazowej PLL. Istnieje wiele przetworników cyfrowo-analogowych na rynku high-end, które nie mają możliwości dopasowania swojej domeny zegara do źródła przychodzącego, ponieważ oscylator(y) pracują ze stałą częstotliwością. Oznacza to, że urządzenie będzie od czasu do czasu opuszczać lub powtarzać próbki (zdecydowanie niepożądane zachowanie) i będzie miało zmienną latencję, więc nie może być używane do wideo ze względu na wynikające z tego przesunięcia typu lipsync.
Na marginesie warto zaznaczyć, że zastosowanie zewnętrznego zegara głównego w systemie dCS nie zastępuje wewnętrznego zegara wewnątrz DAC-a. Działa po prostu jako stabilne odniesienie dla przetwornika cyfrowo-analogowego, do którego może się synchronizować, i umożliwia prawidłową synchronizację przetwornika cyfrowo-analogowego i źródła bez problemów, takich jak zakłócenia międzysymbolowe powodujące drgania w danych audio. Wewnętrzny zegar przetwornika cyfrowo-analogowego nadal dyktuje, kiedy próbki są konwertowane, po prostu dostosowuje swoją częstotliwość w czasie do częstotliwości zegara głównego. Oznacza to, że DAC nadal korzysta z wysokiej jakości zegara blisko obwodów DAC. Zegar bezpośrednio kontrolujący dźwięk jest nadal częścią ściśle kontrolowanego środowiska, a jednocześnie jest zsynchronizowany z resztą systemu.
Pętla Synchronizacji Fazowej (PLL)
Pętla synchronizacji fazowej (lub PLL) to obwód, który działa w celu dopasowania częstotliwości sygnału przychodzącego do częstotliwości sygnału wychodzącego. Są one często używane do synchronizacji wewnętrznego zegara przetwornika cyfrowo-analogowego z zegarem sygnału wejściowego, takiego jak SPDIF z transportu CD. „Detektor fazy” w PLL próbuje dopasować fazę przychodzącego sygnału SPDIF do fazy wewnętrznego zegara przetwornika cyfrowo-analogowego. Jego celem jest uzyskanie jak najniższego błędu fazy, zapewniając, że z biegiem czasu oba zegary będą działać średnio z tą samą szybkością, a bufor DAC nigdy się nie przepełni ani nie przepełni.
Najczęstszym miejscem, w którym można zobaczyć PLL w produkcie audio, jest „gotowy” układ odbiornika SPDIF. Ten chip będzie używany na wejściu SPDIF produktu, zwykle łącząc blok SPDIF z I2S wraz z PLL. Korzystanie z rozwiązania innej firmy, takiego jak to, może powodować pewne problemy. Przy takim układzie może być bardzo trudno oddzielić funkcje konwersji sygnału i dopasowywania domeny zegara. Staje się to problematyczne przy próbie użycia sygnału Word Clock jako zegara głównego dla przetwornika cyfrowo-analogowego. Co więcej, jeśli wydajność chipa nie jest wystarczająca, to nie da się jej zmienić. Dobrym przykładem jest ekstrakcja sygnału zegara z sygnału AES. W rzeczywistości jest to dość trudne do zrobienia; ze względu na strukturę niedozwolonych kodów w sygnale łatwo jest wywołać jitter ze znacznika bloku kanału, który pojawia się co 192 próbki (struktura SPDIF/AES wykracza poza zakres tego postu, ale w istocie sygnał celowo łamie „reguły” przez serię 3 zer lub jedynek z różnych powodów, w tym w celu zablokowania PLL).
W dCS przyjęliśmy inne podejście. Przetworniki cyfrowo-analogowe dCS nadal używają PLL, ale jest to konstrukcja hybrydowa, opracowana w całości we własnym zakresie. Część PLL jest cyfrowa, za pośrednictwem DSP wewnątrz FPGA produktu, a część jest analogowa. Daje to ogromną elastyczność i znacznie wyższy poziom wydajności. Dodatkowo jest całkowicie niezależny od źródła wejściowego. Jesteśmy również w stanie wykonywać takie funkcje, jak radykalna zmiana przepustowości PLL. Dzięki temu DAC może bardzo szybko zablokować się do źródła, dzięki szerokiemu pasmu PLL. Przepustowość można następnie z czasem zawęzić, aby zmniejszyć jitter.
Takie podejście zapewnia, że w produkcie dCS zegar i ścieżki danych pozostają niezależne. Jest część układu FPGA produktu, która działa wyłącznie w celu wyodrębnienia zegara wbudowanego, na przykład, w przychodzący sygnał AES (znowu odbywa się to za pomocą niestandardowego projektu, a nie gotowego układu); inna część, która służy do pobierania dźwięku, inna do kierowania go, a następnie przetwarzania i tak dalej.
Daje nam to ogromną elastyczność w zakresie obsługi, na przykład, Dual AES: możemy sterować sygnałem, mieć osobne wejście zegara głównego, mieć DAC pełniący funkcję zegara głównego dla całego systemu audio, tolerować różne długości kabli w Dual AES i radzą sobie z przesunięciem fazy między zegarem a dźwiękiem, a wszystko to można zrobić bez dodawania opóźnień do dźwięku, co oznacza, że nadal można go prawidłowo zintegrować z wideo. Jesteśmy również w stanie ukryć polecenia osadzone w bitach AES innych niż audio, co pozwala nam, powiedzmy, sterować Vivaldi DAC (produkt nie wyposażony w interfejs sieci ethernet) przez aplikację dCS Mosaic Control.
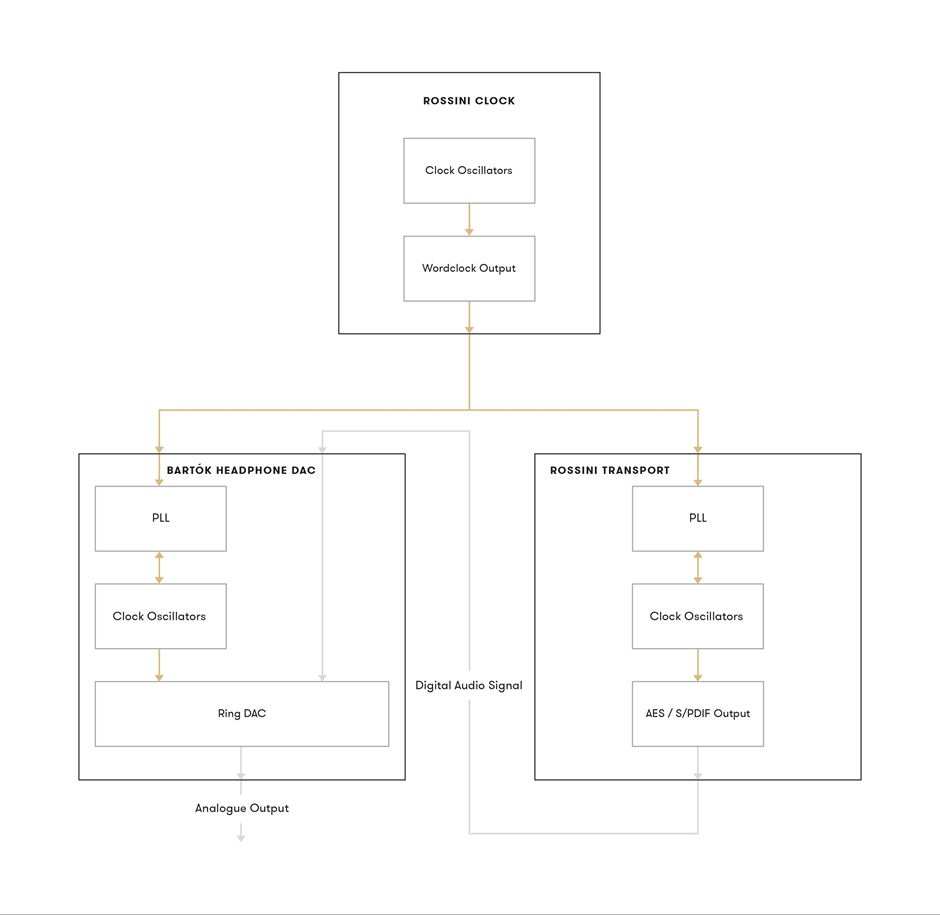
Ten diagram pokazuje uproszczony przykład tego, jak współpracują ze sobą źródło cyfrowe (transport Rossini), przetwornik cyfrowo-analogowy (DAC Bartók) i zegar główny (zegar Rossini). Ogólna wydajność systemu zależy od prawidłowego działania każdego z tych stopni – każdy oscylator, PLL i stopień wyjściowy muszą działać na wysokim poziomie, aby osiągnąć optymalną wydajność.
Dither Zegara
Ustawienia Dither można znaleźć w zegarach dCS Rossini i Vivaldi. Dither jest powszechnie spotykany w cyfrowym audio, gdzie jest używany do wyeksponowania dynamicznej rozdzielczości poniżej najmniej znaczącego bitu. Jednak we wspomnianych zegarach dither jest stosowany do domeny czasu, a nie do domeny amplitudy.
PLL wykazują tzw. „martwe pasmo” w swoich detektorach fazy. Gdy częstotliwości wejściowe i wyjściowe są bliskie synchronizacji, tracą czułość. Następnie PLL dryfuje, dopóki różnica częstotliwości nie będzie wystarczająco duża, aby spowodować ponowne uaktywnienie detektora fazy i powrót do synchronizacji.
W tym miejscu pojawia się zagwozdka: Być może wbrew intuicji, jeśli wprowadzić bardzo małe, losowe zmiany w taktowaniu zbocza sygnału zegara, gdy błąd fazy jest bardzo niski, daje to PLL coś, co sprawa że pętla może się precyzyjnie zatrzasnąć i poprawić (jako przesuwa błąd fazy nieco z powrotem do obszaru, w którym detektor fazy może dobrze skorygować). Dither jest następnie filtrowany w PLL, zanim wyśle ostateczny sygnał zegarowy. W praktycznym odsłuchu jest to dobry kompromis i faktycznie poprawia wydajność systemu. Zasadniczo ustawienie ditheru na zegarze Rossini sprawia, że zegar Bartóka DAC jest bardzo dokładny, nawet gdy PLL pracuje w mniej czułym obszarze błędu o niskiej fazie.
Część 5 – Źródła Asynchroniczne – USB i Ethernet
Dźwięk przesyłany w formacie asynchronicznym (np. strumieniowanie do smartfona przez Spotify, odtwarzanie treści z NAS przez Roon lub odtwarzanie muzyki z komputera przez USB) jest w pewnym stopniu wyjątkiem od zasad podanych w poprzednich punktach, o tyle, o ile jitter nie jest czynnikiem dla danych audio, przynajmniej dopóki nie osiągnie punktu końcowego i zostanie przekonwertowany z powrotem do odpowiedniego formatu (takiego jak PCM lub DSD).
W przypadku dźwięku sieciowego interfejs używany do przesyłania danych dźwiękowych przez sieć nazywa się TCP (ang. Transfer Communication Protocol). Dane, które mają być przesyłane z jednego miejsca do drugiego – w tym przypadku utwór muzyczny – jest podzielony na wiele „pakietów”. Pakiety te zawierają nie tylko same dane („ładunek”), ale także znaczniki wskazujące, skąd pochodzą, dokąd zmierza, ile pakietów jest częścią i jak te pakiety powinny zostać ponownie złożone, aby oryginalne dane zostały z powrotem niezmienione.
Weźmy na przykład utwór z Qobuz przesyłany strumieniowo do przetwornika cyfrowo-analogowego dCS Bartók. Jeśli pakiet danych zostanie utracony lub naruszony, zgodnie z interfejsem TCP, Bartók może po prostu ponownie zażądać tego pakietu. Gdy wszystkie poprawne pakiety zostaną prawidłowo odebrane przez Bartóka, są one rozpakowywane z powrotem do właściwego formatu danych (na przykład PCM) i buforowane przed przesłaniem do przetwornika cyfrowo-analogowego. Ten etap, rozpakowywanie i buforowanie, skutecznie usuwa wszelkie powiązania czasowe między pakietami TCP a wynikowym sygnałem audio. (Przeczytaj to zdanie jeszcze raz, ponieważ jest bardzo ważne.)
Gdy dane zostały zbuforowane w Bartóku, czynniki omówione powyżej stają się ponownie istotne. Dane są teraz bezpośrednio dyktowane przez zegar Bartóka i jako taki jitter staje się czynnikiem. Dokładność zegara Bartóka kontroluje następnie, kiedy przetwornik cyfrowo-analogowy konwertuje próbki z powrotem na napięcia analogowe, co ma bezpośredni wpływ na jakość dźwięku. Jednak dopóki nie osiągnie tego punktu, jitter po prostu nie jest czynnikiem z perspektywy audio.
W podobny sposób działa asynchroniczne audio USB. Nie ma żadnego łącza czasowego między źródłem, takim jak komputer, a punktem końcowym, takim jak Bartók. Nie ma znaczenia, czy podczas przesyłania danych USB bity nie są idealnie rozmieszczone, jak czysta fala prostokątna. Zakładając, że bity są odbierane przez Bartóka poprawnie (na przykład 1 nie jest błędnie odczytywane jako 0), czas jest w dużej mierze nieistotny. Dzieje się tak, ponieważ, podobnie jak w przypadku dźwięku sieciowego, dane są buforowane przed przesłaniem do przetwornika cyfrowo-analogowego. Dopiero w tym momencie taktowanie staje się czynnikiem, ponieważ w tym momencie zostało ono ponownie przekonwertowane z formatu USB na dźwięk cyfrowy (np. PCM lub DSD).